Like most simple things in life this is difficult to write. So whilst the ThrustSSC team struggle to perfect the new rear wheel steering engineering, we’ll try to explain what’s going on for those who are not dumper truck or forklift designers.
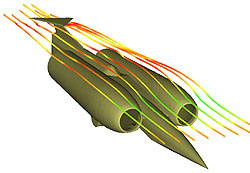
The ThrustSSC design logic was to achieve a forward centre of gravity by using two engines - in single engine designs the best position for the engine is where you need to seat the driver: near the front and with his backside on the centre of gravity. You can compromise and get both the engine and the driver in the wrong position, or you can go about things the ThrustSSC way and try something different. The problems with the twin engined layout are simple - at speed the front wheels can act like huge gyroscopes (imagine 300lbs of wheel revolving at 8500rpm) and if Andy Green were to waggle the steering wheel the gyroscopic forces would be so large that they could lift a front wheel. The other problem is very simple: since the engines are closely cowled there is not room to accommodate a front wheel steering mechanism on ThrustSSC without creating a huge bulge on each side of the bodywork, which would increase air drag and decrease maximum speed.

Of course there is a solution lurking somewhere - and it was Glynne Bowsher who picked it up and ran with it. Why not steer the rear wheels - this way the steering would be with lighter smaller wheels (since the weight is on the front), the gyroscope/roll problem is reduced, and there would be no increase in drag.
Professor Crolla of Leeds University in England came up with the application - the rear wheels would have no camber (the wheel would always be vertical to the ground), no castor (the wheels would not trail the vertical axis like a shopping trolley), and the steering would be irreversible (ThrustSSC would not try to steer the driver). If you want to see how the latter works, just take your hands off your car steering wheel wheel and select reverse - as you go back the wheel will try to swing strongly.
Another fascinating feature is the action: suppose you are driving along a road and decide to move your car from one side of the road to the centre - you steer towards the centre and the car moves directly towards the centre and then you apply a correction once the car is on the centre line. Two simple and predictable movements.
But don’t try that with a rear steer car: you make the first movement to get the tail of the car positioned away from the direction you want to go (the centreline of the road). Once the tail is out the car steers towards the centreline of the road. When you get to the centre of the road you get the tail out in the opposite direction to centre the car on the road's centreline and then out in the opposite direction to straighten up. Six actions instead of two!
All this sounds very complicated, but in fact anyone can pick it up quickly in a lap or two with Glynne’s rear-wheel-steer mini, and Andy Green’s full scale steering tracks the white lines on Jafr very precisely.

So where’s the problem? We always knew that we were attempting something very new and that there would almost certainly be problems. What we are getting is wheel shimmy at 300 mph. The video cameras are picking up a very rapid side to side oscillation of the rear wheels. The design incorporates massive steering members with a worm drive at the top of each strut within which there is a rotating torque tube. Any slight play in the worm drive gears can cause the shimmy which rapidly builds and opens up the tolerances. From Andy’s point of view the car stops responding to steering inputs.

The forces are very considerable and are damaging the steering quadrant pins and quadrants - spares and new pins from PDS Engineering in Nelson, Lancashire, are on their way.
So like any group of engineers faced with such a problem we have to find a solution. Classically this is approached by endeavouring to find the cause of the shimmy and hence reduce its level - and also by damping and beefing up the steering to ensure that the wheels are held tight.
Interestingly the desert has now become slightly softer with recent rain and the wheels sinking in very slightly at speed. This leads to another interesting consideration: if the wheels are sinking in only 3-5mm then the wheel tread will be creating a ramp of desert material ahead of the point of contact. The effect of this may be induce leading castor - to understand this think again of your supermarket trolley! If one of the wheels points ahead, it very soon flicks back into the stable trail position once you start moving ahead with the groceries. Leading castor is unstable and it may this which is causing a portion of the problems.

So we have to reposition the steering strut within the existing geometry, add damping and beef up the existing components. Three days delay with parts made in UK overnight and flown across with the help of Royal Jordanian. Record breaking was never easy, but once we have this licked ThrustSSC should move ahead quickly into the 600mph speed range. And the weather has turned hot again today!

|
The author of this article, Richard_Noble, is the ThrustSSC's Project Leader and held the World Land Speed Record from 1983 to 1997. |
 |
 |
 |
||
| Sponsored by | This site best viewed with Microsoft Internet Explorer 3 | |||